Aruco码定位、增稳、防抖
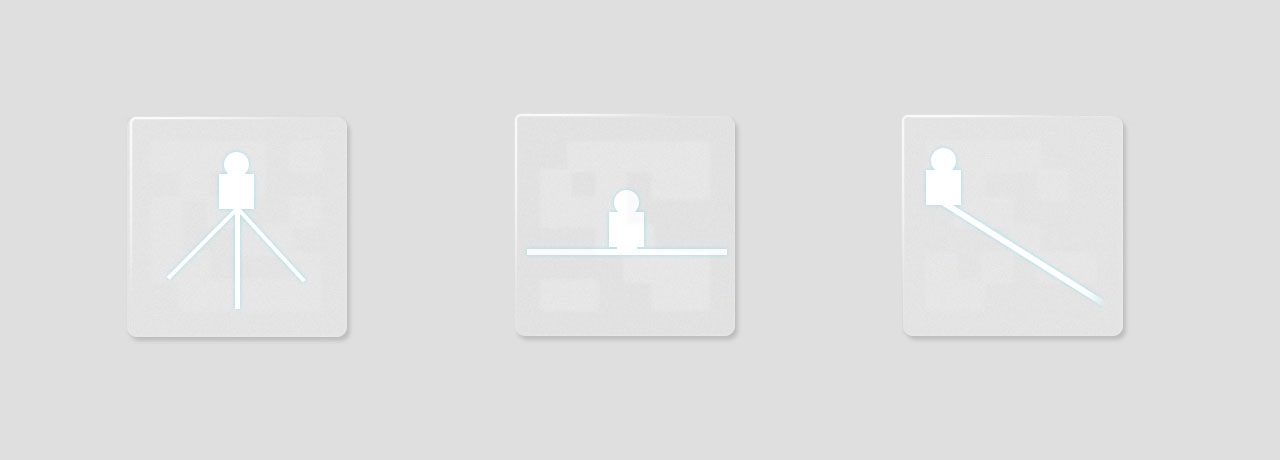
独创的Aruco码实时姿态估计算法,帧级别检出相对摄像机的位姿
通过多组Aruco Marker二进制平方标记点矩阵,确定摄像机拍摄范围及摄像机的相关参数,如形变、位移、缩放、姿态......以此快速判定并反馈数据。稳定防抖核心在于消除抖动噪声的同时,处理、匹配数据变化,完成虚拟场景的同步、稳定跟踪

采用自研光学+机械传感器的融合算法,通过光学传感器的高精度检测和机械传感器的运动识别,实现精准虚拟跟踪的能力。
精准跟踪的功能对于虚拟演播室中至关重要,能够捕捉到细微的动态变化,确保画面清晰、前后景不穿插、跟踪效果稳定,使得虚拟制作结果更加专业、引人入胜。
独创的Aruco码实时姿态估计算法,帧级别检出相对摄像机的位姿
通过多组Aruco Marker二进制平方标记点矩阵,确定摄像机拍摄范围及摄像机的相关参数,如形变、位移、缩放、姿态......以此快速判定并反馈数据。稳定防抖核心在于消除抖动噪声的同时,处理、匹配数据变化,完成虚拟场景的同步、稳定跟踪

利用双目视觉和高分辨率的传感器,感知周围对象在范围内的位置
通过光学传感器的高精度检测和机械传感器的运动识别,使用定位地图重构技术,实时描绘前方三维世界,感知三维世界空间和运动
匹配现实与虚拟世界的摄像机数据,毫秒级快速捕获差异并修正,实现平稳跟踪
解决了传统机电跟踪的痛点。摄像师可以轻松实现任意移动拍摄位置,无需进行繁琐的测量和计算
依托先进光学识别算法,AI能够通过摄像机对光学标识的读取,自动完成标定,确保摄像机定位和跟踪准确性,简化操作流程,提升制作效率

有轨+无轨跟踪效果无缝衔接技术,让摄像机运动过程更加流畅、连贯
通过精心设计的算法和智能控制,实现有轨跟踪与无轨跟踪交相辉映,在小空间演播室中也能实现超大规模有轨摇臂的效果
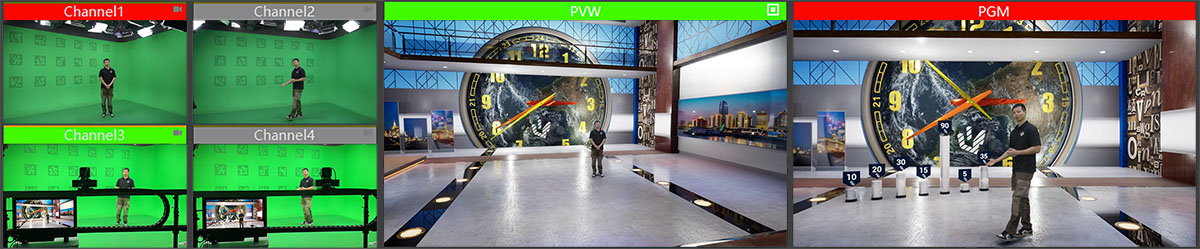

“控制-跟踪”双向协议带来不同操作体验。用户无需学习另外一套操作界面,只需在直观的虚拟演播室软件中,通过简单“WASD”操作模式,便可所见即所得、实时完成复杂拍摄镜头
实时双向通讯协议的采用、双向数据的融合校验、谐波减速器的集成开发以及针对性的优化PID控制算法让我们开启了移动拍摄智能化的密码,多种传统移动拍摄跟踪方式都将被赋予智慧的灵魂
图像识别、机械传感,软硬兼修、融会贯通U-TianMa可以使用多种跟踪设备:机器人、电控摇臂、轨道机器人、摄像机背负系统等等......
基于U-TianMa图像识别,实时绑定摄像机运动姿态,反馈数据
可代替专业的摇臂操作人员摄像,降低重要场合人工拍摄时画面的出错率
可实现新闻类、专题类演播室节目录制开场和结束镜头画面拍摄的标准化
机器人摇臂自动跟踪场景拍摄,可在摇臂运动时云台AI自动跟踪主景拍摄,方便构图
可联控轻量化电控轨道,轨道拍摄轻而易举
励得电控轨道采用模块化设计,安装方便、运动安静、占地极小
全部功能可通过软件远程遥控,使智能演播室实现无摄像师拍摄轨道运动画面。
使用轻量化的跟踪设备,手持云台或者摄像机背负系统;不需要定点、定位,实时跟踪、捕捉主持人的运动信息,无差别反馈数据,与逼真虚拟三维场景绑定,实现超越真实世界的拍摄效果