Aruco碼防抖系統
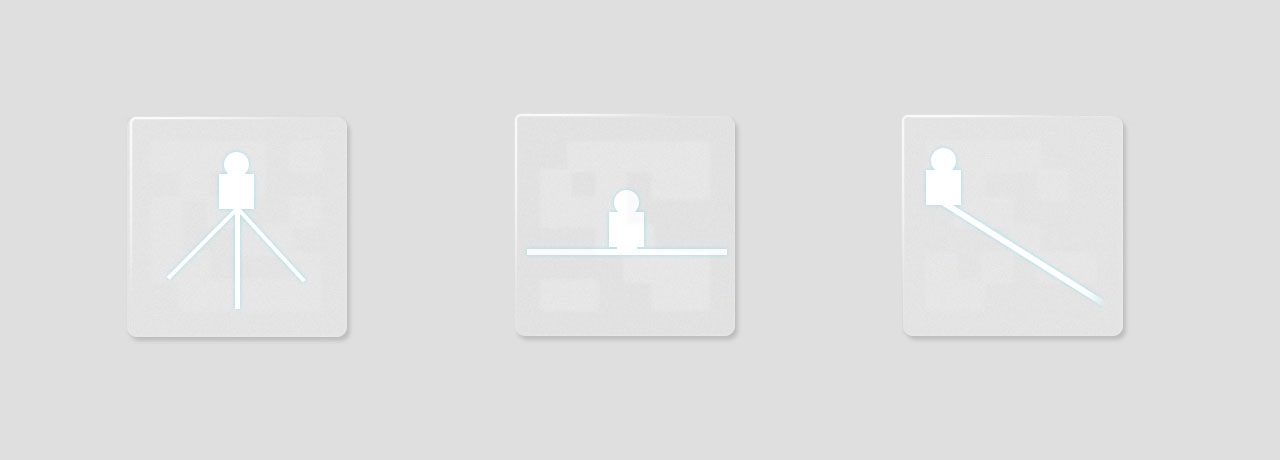
獨創的Aruco碼即時姿態估計演算法,幀級別檢出相對攝像機的位姿
對攝像機進行即時位姿計算,與機械傳感資料智慧融合,實現攝像機的即時穩定和抖動抑制

採用自研光學+機械感測器的融合演算法,通過光學感測器的高精度檢測和機械感測器的運動識別,實現精准虛擬跟蹤的能力。
精准跟蹤的功能對於虛擬演播室中至關重要,能夠捕捉到細微的動態變化,確保畫面清晰、前後景不穿插、跟蹤效果穩定,使得虛擬製作結果更加專業、引人入勝。
獨創的Aruco碼即時姿態估計演算法,幀級別檢出相對攝像機的位姿
對攝像機進行即時位姿計算,與機械傳感資料智慧融合,實現攝像機的即時穩定和抖動抑制

利用雙目視覺和高解析度的感測器,感知周圍物件在範圍內的位置
通過光學感測器的高精度檢測和機械感測器的運動識別,使用定位地圖重構技術,即時描繪前方三維世界,感知三維世界空間和運動
解決了傳統機電跟蹤的痛點。攝像師可以輕鬆實現任意移動拍攝位置,無需進行繁瑣的測量和計算
依託先進光學識別演算法,AI能夠通過攝像機對光學標識的讀取,自動完成標定,確保攝像機定位和跟蹤準確性,簡化操作流程,提升製作效率

有軌+無軌跟蹤效果無縫銜接技術,讓攝像機運動過程更加流暢、連貫
通過精心設計的演算法和智慧控制,實現有軌跟蹤與無軌跟蹤交相輝映,在小空間演播室中也能實現超大規模有軌搖臂的效果
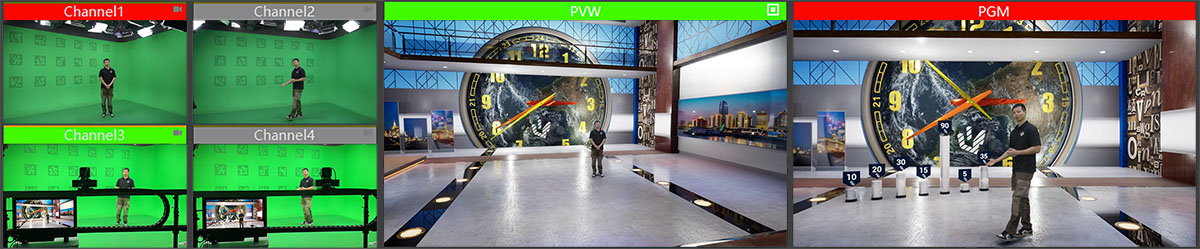

“控制-跟蹤”雙向協議帶來不同操作體驗。使用者無需學習另外一套操作介面,只需在直觀的虛擬演播室軟體中,通過簡單“WASD”操作模式,便可所見即所得、即時完成複雜拍攝鏡頭
即時雙向通訊協定的採用、雙向資料的融合校驗、諧波減速器的集成開發以及針對性的優化PID控制演算法讓我們開啟了移動拍攝智慧化的密碼,多種傳統移動拍攝跟蹤方式都將被賦予智慧的靈魂
圖像識別、機械傳感,軟硬兼修、融會貫通U-TianMa可以使用多種跟蹤設備:機器人、電控搖臂、軌道機器人、攝像機背負系統等等......
基於U-TianMa圖像識別,即時綁定攝像機運動姿態,回饋資料
可代替專業的搖臂操作人員攝像,降低重要場合人工拍攝時畫面的出錯率
可實現新聞類、專題類演播室節目錄製開場和結束鏡頭畫面拍攝的標準化
機器人搖臂自動跟蹤場景拍攝,可在搖臂運動時雲台AI自動跟蹤主景拍攝,方便構圖
可聯控輕量化電控軌道,軌道拍攝輕而易舉
勵得電控軌道採用模組化設計,安裝方便、運動安靜、占地極小,全部功能可通過軟體遠端遙控,使智慧演播室實現無攝像師拍攝軌道運動畫面。
使用輕量化的跟蹤設備,手持雲台或者攝像機背負系統;不需要定點、定位,即時跟蹤、捕捉主持人的運動資訊,無差別回饋資料,與逼真虛擬三維場景綁定,實現超越真實世界的拍攝效果